1. REVIEW: TYPES OF TRANSFORMATIONS
A transformation changes the position, size, or orientation of a geometric figure while preserving certain properties (e.g., distances in rigid transformations). It maps an object to its image.
Applications: Geometry, computer graphics, animation, engineering, mapping.
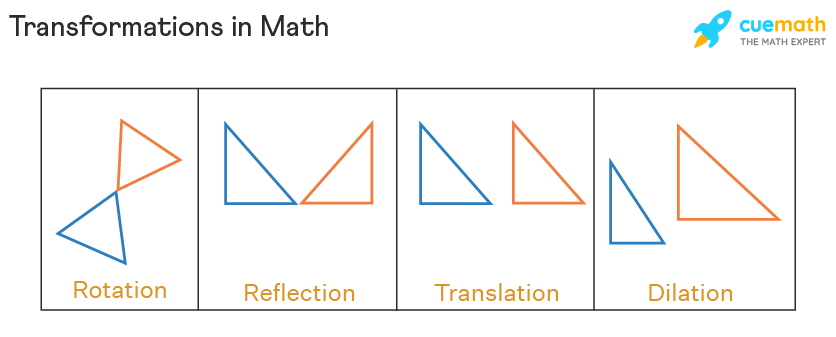
Types of Transformations: [Fig 1.1]
1.Reflection (Flip) – Mirror image over a line (axis of reflection). Points are equidistant from the line.
| Axis/Line | Formula |
|---|---|
| x-axis | (x, y) → (x, -y) |
| y-axis | (x, y) → (-x, y) |
| y = x | (x, y) → (y, x) |
| y = -x | (x, y) → (-y, -x) |
2.Rotation (Turn) – Turn about a point (center) by angle θ.
| Angle | Formula (about origin) |
|---|---|
| +90° CCW | (x, y) → (-y, x) |
| -90° CW | (x, y) → (y, -x) |
| 180° | (x, y) → (-x, -y) |
3.Translation (Slide) – Shift figure by a fixed distance in a direction.
Formula: T(a,b): (x, y) → (x + a, y + b)
4.Enlargement (Scale) – Resize figure from a center by scale factor k.
| Scale factor | Formula |
|---|---|
| k | (x, y) → (kx, ky), k>1 enlarge, 0 |
Notes:
Reflection, rotation, translation = rigid (shape preserved)
Enlargement = non-rigid (size changes)
2. COMPOSITION OF TRANSFORMATIONS
Definition: Applying one transformation after another. Notation: T1 ∘ T2 = apply T2 first, then T1.
Key Points:
Order matters: T1 ∘ T2 ≠ T2 ∘ T1
Two reflections → translation/rotation depending on axes
Enlargements at same center → commutative
Examples:
Reflection x-axis → y-axis = 180° rotation
Two parallel reflections → translation by 2×distance
Enlargement E1(k1) → E2(k2) = E(k1×k2)
Daily Life: Sliding + flipping in animations, rotations in games, enlargements in maps.
3. INVERSION TRANSFORMATION & CIRCLE
Definition: Maps point P → P' such that O, P, P' are collinear and OP × OP' = r².
Properties:
Not rigid (distances change), angles preserved
Points on circle: invariant
Inside circle → outside image, vice versa
Formulas:
| Center | Formula |
|---|---|
| (0,0) | P'(x',y') = (r²x/(x²+y²), r²y/(x²+y²)) |
| (h,k) | x' = h + r²(x-h)/((x-h)²+(y-k)²), y' = k + r²(y-k)/((x-h)²+(y-k)²) |
Example:
P(4,5), r²=100, origin center → P' = (400/41, 500/41)
4. TRANSFORMATION USING MATRICES
Concept: Linear transformations represented by matrices.
Types:
2x1 matrix → Translation: add vector
2x2 matrix → Rotation, reflection, scaling: multiply
Common 2x2 Matrices:
| Transformation | Matrix |
|---|---|
| Reflection x-axis | [[1,0],[0,-1]] |
| Reflection y-axis | [[-1,0],[0,1]] |
| Reflection y=x | [[0,1],[1,0]] |
| Reflection y=-x | [[0,-1],[-1,0]] |
| Rotation +90° | [[0,-1],[1,0]] |
| Rotation -90° | [[0,1],[-1,0]] |
| Rotation 180° | [[-1,0],[0,-1]] |
| Enlargement k | [[k,0],[0,k]] |
Note:
Object matrix = column matrix of points
Image = Transformation × Object
5. IMPORTANT QUESTIONS WITH SOLUTIONS
Q1: Reflection then Rotation
A(2,3) → reflect y=x → rotate 90° CCW
Solution:
Reflect: A'=(3,2)
Rotate +90°: A''=(-2,3)
Q2: Translation then Enlargement
B(1,2) → T(3,-1) → E(2)
Solution:
Translate: (4,1)
Enlarge: (8,2) → B''=(8,2)
Q3: Two Rotations
C(2,0) → +90° then -90°
Solution:
+90°: (0,2)
-90°: (2,0) → Back to original
Q4: Perpendicular Reflections
D(1,3) → x-axis then y-axis
Solution:
x-axis: (1,-3)
y-axis: (-1,-3) → Equivalent to 180° rotation
Q5: Inversion w.r.t shifted center
P(4,3), O(1,1), r=5
Solution:
x' = 1 + 25*(3)/13 ≈ 6.77
y' = 1 + 25*(2)/13 ≈ 4.85
P' ≈ (6.77,4.85)
Q6: Matrix – Rotation + Scaling
Triangle A(1,0),B(0,1),C(1,1), matrix [[0,-2],[1,0]]
Solution:
A'=(0,1), B'=(-2,0), C'=(-2,1)
Q7: Reflection y=-x then Translation
Q(-2,5) → y=-x → T(3,-1)
Solution:
Reflection: (-5,2)
Translation: (-2,1) → Q''=(-2,1)
Q8: Rotation about point P(1,1)
R(3,4) → 90° CCW
Solution:
Shift: (2,3)
Rotate: (-3,2)
Shift back: (-2,3) → R'=(-2,3)
Q9: Enlargement then Reflection
S(2,-1), k=3 → x-axis
Solution:
Enlarge: (6,-3)
Reflect: (6,3) → S''=(6,3)
Q10: Complex Composition with Matrices
T(1,2), M1=[[0,-1],[1,0]], M2=[[2,0],[0,3]]
Solution:
Rotation: (-2,1)
Scaling: (-4,3) → T''=(-4,3)
Q11: Height of Building Problem
Walking 40m, angles 30° and 45°
Solution:
tan30 = h/x → x = h√3
tan45 = h/(x-40) → x-40 = h
Solve: h(√3-1) = 40 → h = 40(√3+1)/2 ≈ 54.64 m
Visit this link for further practice!!
https://besidedegree.com/exam/s/academic
Gallery
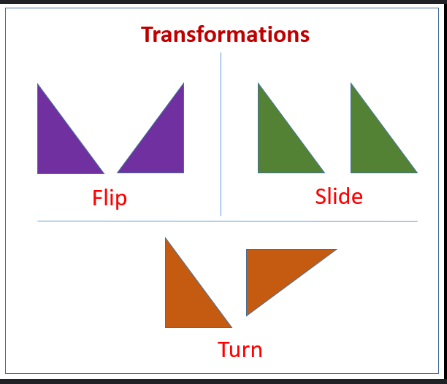
Fig 1.1
Fig 1.1